Ce
guide ne comportera que cette exemple de programme
utilisant PolySnd v2.0 en ASM.
Il
ne vous reste plus qu'à essayer ce programme
sur votre calculatrice, si celui-ci ne ce compile
pas ou ne s'exécute pas correctement, veuillez
vérifier que vous avez tout tapé correctement.
 Télécharger
example1.zip en ASM
Télécharger
example1.zip en ASM
Code
en C:
Nous
allons maintenant écrire le même programme
mais en C. Voyons voir à quoi ressemble le
code de base.
|
//
C Source File
// Created 11/10/2003; 17:13:50
#include
<tigcclib.h>
#include "polysnd2.h"
INT_HANDLER OldInt1
=
NULL;
INT_HANDLER OldInt2 =
NULL;
DEFINE_INT_HANDLER
(myint2)
{
pokeIO (0x60001B,0);
}
//Programme
principal
void
_main(void)
{
OldInt1 = GetIntVec (AUTO_INT_1);
OldInt2 = GetIntVec (AUTO_INT_2);
SetIntVec (AUTO_INT_1,
DUMMY_HANDLER);
SetIntVec (AUTO_INT_2,
myint2);
pSnd_EnableSound ();
pSnd_InstallSound ();
while(_keytest
(RR_ESC)==FALSE);
pSnd_UninstallSound ();
pSnd_DisableSound ();
SetIntVec (AUTO_INT_1,
OldInt1);
SetIntVec (AUTO_INT_2,
OldInt2);
}
|
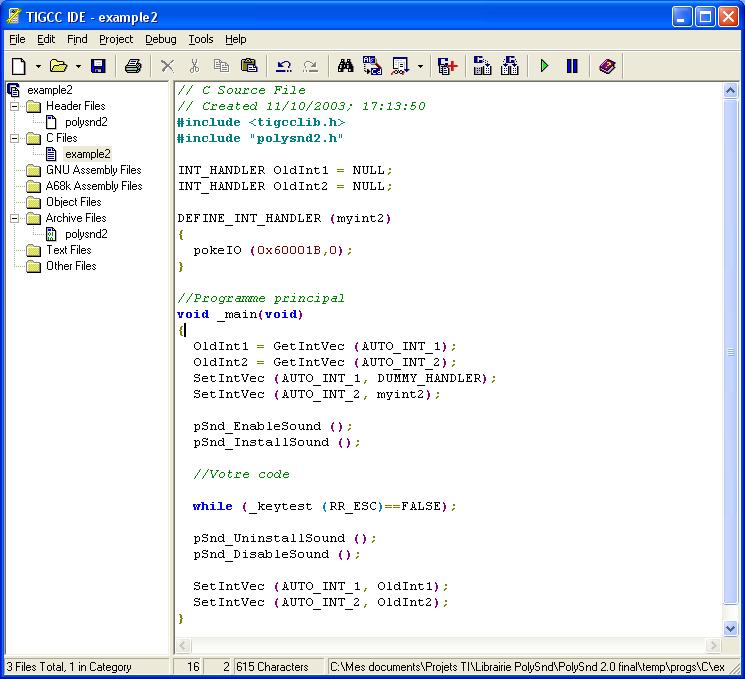
Ceci
est la base d'un programme en C utilisant PolySnd
v2.0, ce programme ne fait pas grand chose, il attend
juste l'appui de la touche ESC. Voyons voir ce que
donne le code en C pour jouer une fréquence
de 440 Hz pendant 3 secondes, qui peut être
à tout moment interrompus.
Voici
le programme final avec le code ajouté:
|
//
C Source File
// Created 11/10/2003; 17:13:50
#include
<tigcclib.h>
#include "polysnd2.h"
INT_HANDLER OldInt1
=
NULL;
INT_HANDLER OldInt2 =
NULL;
DEFINE_INT_HANDLER
(myint2)
{
pokeIO (0x60001B,0);
}
//Programme
principal
void
_main(void)
{
OldInt1 = GetIntVec (AUTO_INT_1);
OldInt2 = GetIntVec (AUTO_INT_2);
SetIntVec (AUTO_INT_1,
DUMMY_HANDLER);
SetIntVec (AUTO_INT_2,
myint2);
pSnd_EnableSound ();
pSnd_InstallSound ();
pSnd_SetTempo_voice1
(120);
pSnd_PlayMode (MONO);
pSnd_SetBeep_voice1 (440,192);
pSnd_SetState (VOICE1);
while
((_keytest
(RR_ESC)==FALSE)
&& (pSnd_GetState()==VOICE1));
pSnd_UninstallSound ();
pSnd_DisableSound ();
SetIntVec (AUTO_INT_1,
OldInt1);
SetIntVec (AUTO_INT_2,
OldInt2);
}
|
Voilà
donc le programme finit, comme vous le remarquez
nous avons tout d'abord réglé le tempo
à 120 bpm sur le canal n°1, puis ensuite
nous avons configuré la librairie en mono.
Nous avons réglé la fonction SetBeep
sur le canal n°1 et ensuite avec SetState
nous permettons de jouer ce mode. Reste à
dire au programme d'attendre la pression de la touche
ESC ou la fin du mode SetBeep pour
quitter le programme.
Si
vous voulez plus d'explications sur les fonctions
de PolySnd v2.0, veuillez lire la documentation
fournis dans le pack.
Télécharger
example1.zip en C
Un
second projet:
Nous
avons vu pour l'instant comment ce forme un programme
en C ou en ASM utilisant PolySnd, notre exemple
utilisait des fonctions simple de PolySnd v2.0,
maintenant nous allons réaliser un programme
capable de sortir une musique en stéréo
en attendant la pression de la touche ESC ou la
fin de la musique, pour cela nous allons procéder
par étapes et nous aurons besoin de PolySnd
MIDI Converter.
Vous
devez tout d'abord télécharger la
musique 'Mario' que nous allons utiliser pour notre
projet.
Télécharger
Mario.mid
Maintenant
nous devons télécharger PolySnd
MIDI Converter qui s'occupera de convertir ce
fichier MIDI dans le format voulu pour notre programme.
Télécharger
PolySnd MIDI Converter v3.2.1
Après
avoir téléchargé PolySnd
MIDI Converter, il vous reste à l'installer
sur votre disque dur. Une fois cette étape
de terminée, nous allons commencer à
réaliser notre projet.
Réalisation
du projet:
Ouvrez
TIGCC et réaliser un projet en C avec PolySnd
v2.0 ce nommant 'example2',
procédez de la même façon que
pour notre premier programme. Vous devez vous retrouver
avec un projet constitué de cette façon:
Nous
allons pour l'instant enregistrer notre projet et
mettre de côté TIGCC pour pouvoir convertir
'Mario',
ouvrez PolySnd MIDI Converter, vous devez
vous retrouver avec cette environnement:

Cliquez
sur le 'File/Open'
et choisissez 'Mario',
la liste 'Tracks'
dans 'Convert
tracks' doit ce remplir avec 3 pistes classé.
Dans 'Data
type' cochez la case C et dans 'Management
of PolyNotes' cochez la case 'Last
Note'.
La
zone 'Data
type' permet de choisir le langage dans le
quel on veut que les données soit traduite.
La
zone 'Management
of PolyNotes' définit le comportement
du convertisseur lorsqu'il rencontre plusieurs notes
joué en même temps, le mode:
- Alternation
(Alterné) joue toutes les notes mais avec
une durée de 1 cycle ce qui augmente dans
des cas considérablement la taille des données
mais la qualité s'en trouve bien meilleur.
- Average
frequency (Frequence moyenne), parmis
toutes les notes, le convertisseur cherche la note
moyenne, ce mode est assez moyen en qualité
et peu des fois donner des résultats assez
inattendus, il est généralement utilisé
dans des musique dont le nombre de PolyNote est
élevé.
- First
note (Première note), dans la
liste des notes, le convertisseur prend la première
note, ce mode est le plus économique mais
donne des résultats horrible pour la plupart
des fichiers MIDI, généralement il
est utilisé pour des fichiers MIDI assez
simple.
- Last
Note (Dernière note), dans la
liste des notes, le convertisseur prend la dernière
note, ce mode est très très économique
et donne un bon rapport en qualité et en
taille, c'est ce mode là que nous allons
utiliser pour convertir Mario, dans la mesure ou
Mario possède très peu de PolyNotes
qui ne sont pas importante. Ce mode s'adapte parfaitement
dans la plupart des musique sauf dans celle composé
de beaucoup de PolyNotes.
PolySnd
MIDI Converter offre de multiple informations
et il est possible de modifier certains paramètres
comme:
- Add
octaves (Ajouter octave), ce mode permet
de monter ou descendre la musique à partir
du MIDI d'un certain nombres d'octaves, plus ce
nombre est élevé plus la musique convertie
sera aigus et inversement, il est possible d'entrer
un argument négatif mais attention, si dans
vos données vous avez un octave inférieur
à 0 ou supérieur à 9 vous ne
pourrais pas l'utiliser, PolySnd possède
au maximum 10 octaves notée de 0 à
9.
- Division
of duration (Division de durée),
ce mode permet d'augmenter ou diminuer le tempo
d'origine, plus la valeur est petite plus le tempo
est élevé et plus la musique à
une meilleur qualité dans le cas du mode
'Alternation' et dans le cas contraire vous obtenez
des données de plus petite taille qui peuvent
voir leur qualité diminuer dans le cas ou
vous perdez des notes. Il est possible d'entrer
un nombre à 2 chiffres après la virgule.
Le convertisseur vous donnera la valeur du nouveau
tempo de PolySnd comparé au tempo réel
du MIDI.
Sur
ces explications vous serez capable de convertir
n'importe quel MIDI et de modifier certains paramètres
suivant ce que vous recherchez (qualité audio
ou taille des données), mais reste un point
assez important, car il n'est pas réellement
conseilléde convertir un MIDI tel quel qui
de plus contienténormément de pistes
(plus de 4), vous devrez pour cela le modifier et
effacer les pistes inutile pour PolySnd, comme vous
le savez PolySnd est capable de jouer que 2 pistes
(une par canal) voir plus si le mode 'Alternation'
est coché. Pour voir la procédure
de retouche d'un fichier MIDI, allez dans la rubrique
consacré à PolySnd MIDI Converter.
Revenons à
la conversion de 'Mario',
vous devez vous retrouver avec les bon paramètres:

Vous
constatez que la musique 'Mario'
comporte 3 pistes pour le convertisseur, or réellement
'Mario'
comporte 2 piste, la piste n°1 est en faite
une piste contenant des informations mais sans aucune
note. La plupart des morceau possède cette
structure mais il peut exister des exceptions.
Nous
allons tout d'abord convertir un par un les tracks
et les enregistrer dans des fichiers, pour cela
cliquer sur le chiffre 2 dans le menu Tracks et
faite le passer à droite avec le bouton ">"
ou avec un double clique, le bouton 'Convert'
devient disponible, cliquez dessus. Le convertisseur
créer les données à travers
divers étapes qui sont affiché en
bas, une fois les étapes terminé,
le bloc note de Windows s'ouvre avec les données
sous la forme du langage choisit. Fermez le bloc
note et cliquez sur le menu 'File/Save ' de PolySnd
MIDI Converter, choisissez le répertoire
ou ce trouve le projet de l'exemple 2 et nommez
le fichier 'mario1.h'.
Ouvrez ce fichier avec un éditeur de texte
et modifier 'unsigned
char channel []' par 'unsigned
char mario_channel1 []'.
Nous
allons procéder de la même façon
pour convertir la piste n°3 de 'Mario' mais
auparavant vous devez enlever de la liste 'Convert
tracks' l'ancienne piste qui a été
convertie. Une fois la conversion terminé
de la piste n°3, enregistré les données
dans le fichier 'mario2.h'
dans le répertoire de votre projet. Ouvrez
ce fichier avec un éditeur de texte et modifier
'unsigned
char channel []' par 'unsigned
char mario_channel2 []'.
Nous
n'utiliserons plus PolySnd MIDI Converter
à partir de maintenant, nous devons maintenant
inclure dans notre projet les fichiers 'mario1.h'
et 'mario2.h'
et écrire le code permettant de jouer cette
musique. Pour cela cliquez sur le menu 'Project/Add
Files'.
Pour
déclarer ses 2 fichiers dans notre programme
nous allons écrire ses lignes en dessous
de '#include
"polysnd2.h"'
|
#include
"mario1.h"
#include "mario2.h"
|
Une
fois la déclaration des fichiers, nous allons
écrire le code qui devra s'occuper de jouer
la musique de 'Mario'.
Vous devez ajouter ce code en dessous de 'pSnd_InstallSound
();'
|
pSnd_PlayMode (STEREO);
pSnd_SetTempo (105);
pSnd_PlaySound_voice1 (mario_channel1);
pSnd_PlaySound_voice2 (mario_channel2);
pSnd_SetState (ALLVOICES);
|
pSnd_PlayMode
(STEREO), s'occupe de régler PolySnd
v2.0 en mode stéréo ce qui signifie
qu'il est possible d'utiliser un mode différent
ou des données différente sur un canal,
contrairement au mode mono qui ignore les fonctions
basé sur voice2 (canal n°2) et
donc le mode est joué sur les 2 canals.
pSnd_SetTempo,
aurait plus être remplacé par pSnd_SetTempo_voice1
et pSnd_SetTempo_voice2, en effet pSnd_SetTempo
est une définition qui permet de régler
le tempo des 2 canals en même temps. Dans
notre exemple nous avons un tempo de 105 bpm pour
'Mario'
sur les 2 canals.
pSnd_PlaySound_voice[1|2],
s'occupe de mettre PolySnd v2.0 en mode 'MIDI' sur
le canal 1 ou 2, l'argument spécifié
doit être une série de données
audio. Dans notre exemple mario_channel1
et mario_channel2.
pSnd_SetState
(ALLVOICES), enfin cette instruction permet
de dire à PolySnd v2.0 de jouer les modes
précédemment configuré sur
le ou les canals voulu. Dans notre exemples nous
activons la lecture des données MIDI sur
tout les canals.
Maintenant
il nous reste à ajouter la ligne qui nous
permettra de quitter le programmant en pressant
la touche ESC ou en attendant la fin de la musique.
|
while
((_keytest
(RR_ESC)==FALSE)
&& (pSnd_GetState()!=NOVOICE1));
|
pSnd_GetState()!=NOVOICE,
signifie que tant que tout les canals ne sont pas
terminé, nous continuons la boucle, de façon
plus logique nous auront plus remplacer cette ligne
par:
|
while
((!_keytest
(RR_ESC))
&& (!(pSnd_GetState()==NOVOICE1)));
|
Cette
ligne contenant une boucle vide n'exécute
aucunes instructions et pourtant la musique continue
à être joué, pourquoi? PolySnd
v2.0 est une librairie multitâche dans le
fait qu'il est possible d'exécuter une série
d'instructions en même temps que du son ce
joue en tâche de fond. Dans notre exemple
le son commence à l'instruction pSnd_SetState
qui s'occupe 'd'activer' PolySnd v2.0, le programme
ce déroule et la librairie joue le son en
même temps, elle ne s'arrêtera que lorsque
vous aurez modifier son comportement avec une fonction
de PolySnd ou que les données quelle doit
lire soit épuisé. Voyez PolySnd v2.0
comme les niveaux de gris sur TI, quand vous programmé
une image en niveau de gris, vous avez juste besoin
de spécifier les plans et non contrôler
l'écran, c'est le même principe pour
PolySnd, vous spécifiez des données
sonores et la librairie fait le reste.
Grâce
au 2 premiers exemples vous voyez qu'il est assez
plaisant et facile de programmer avec PolySnd v2.0,
de plus son incorporation dans des projets demandant
beaucoup de ressources est possible tel que les
jeux, player...
Dans
notre prochain exemple nous allons voir comment
utiliser PolySnd v2.0 dans un projet s'occupant
d'afficher une balles sur l'écran et de jouer
des sons et ce sans interrompre le mouvement de
la balle pendant que le son est joué. Nous
étudierons ensuite comment bloquer une action
en attendant la fin d'un son.
Télécharger
example2.zip
Animation
d'une balle avec du son (partie n°1):
Dans
ce programme nous allons vraiment commencer à
exploiter les performances de PolySnd v2.0, nous
allons réaliser un programme réalisant
le déplacement d'une balle avec un angle
de 45°, chaque rebond sur l'écran correspondera
à un son.
Créez
un nouveau projet en C avec la librairie PolySnd
v2.0 que vous nommerez 'example3'
avec le code de base pour initialiser PolySnd v2.0.
Nous
allons tout d'abord réaliser le programme
sans s'occuper du son, nous devons tout d'abord
définir le sprite et les déplacements
de la balle, après avoir fait ceci, nous
réaliseront les effets sonores et nous appliquerons
à chaque collisions un son différent.
Réalisation
du sprite (image) de la balle:
unsigned char ball_sprite [] = {0b00111100,
0b01111110,
0b11111111,
0b11111111,
0b11111111,
0b11111111,
0b01111110,
0b00111100};
|
Inserez ce
code en dessous de:
|
DEFINE_INT_HANDLER (myint2)
{
pokeIO (0x60001B,0);
}
|
Notre sprite
fait du 8x8 pixels, nous allons nous attquer au
code de gestion de la balle.
Réalisation
du code de déplacement de la balle:
La
position de notre balle sera définis par
2 variables xpos
et ypos
qui indiquerons ça positions en X et Y, à
chaque passage de boucle, nous incrémenterons
ses variables avec un facteur indiquant la direction
de la balle, soit xdir
pour son déplacement suivant X et ydir
suivant Y. Pour afficher et effacer correctement
la balle, nous l'afficherons avec un OU logique
à la fin de la boucle et nous l'effacerons
avec OU exclusif (XOR) au début de la boucle,
bien sûr nous prenderons soin d'afficher la
balle avec une bonne vitesse et avec une boucle
d'attente.
Voici le
code du programme:
|
//
C Source File
// Created 11/10/2003; 17:13:50
#include
<tigcclib.h>
#include "polysnd2.h"
INT_HANDLER OldInt1
=
NULL;
INT_HANDLER OldInt2 =
NULL;
DEFINE_INT_HANDLER
(myint2)
{
pokeIO (0x60001B,0);
}
unsigned char ball_sprite [] = {0b00111100,
0b01111110,
0b11111111,
0b11111111,
0b11111111,
0b11111111,
0b01111110,
0b00111100};
//Programme
principal
void
_main(void)
{
int
i;
short
xpos
= (LCD_WIDTH-1)/2;
short
ypos =
(LCD_HEIGHT-1)/2;
char
xdir =
1,
ydir =
1;
OldInt1
= GetIntVec (AUTO_INT_1);
OldInt2 = GetIntVec (AUTO_INT_2);
SetIntVec (AUTO_INT_1,
DUMMY_HANDLER);
SetIntVec (AUTO_INT_2,
myint2);
pSnd_EnableSound ();
pSnd_InstallSound ();
ClrScr
();
Sprite8 (xpos,
ypos,8
,ball_sprite, LCD_MEM, SPRT_OR);
while
(_keytest
(RR_ESC)==FALSE)
{
Sprite8
(xpos, ypos,
8, ball_sprite, LCD_MEM, SPRT_XOR);
xpos+=xdir;
ypos+=ydir;
if (xpos+8
> (LCD_WIDTH-1))
xdir =
-1;
if (xpos
<
0)
xdir =1;
if (ypos+8
>
(LCD_HEIGHT-1))
ydir =
-1;
if (ypos
<
0)
ydir =
1;
Sprite8
(xpos,
ypos, 8,
ball_sprite, LCD_MEM, SPRT_OR);
for (i=0;
i<10000;
i++);
}
pSnd_UninstallSound ();
pSnd_DisableSound ();
SetIntVec (AUTO_INT_1,
OldInt1);
SetIntVec (AUTO_INT_2,
OldInt2);
}
|
Nous
allons nous occuper maintenant des divers parties
de ce code pour mieux comprendre ce programme et
ainsi pouvoir y introduire des séquences
sonores sans trop de difficultés.
|
int
i;
short
xpos
= (LCD_WIDTH-1)/2;
short
ypos =
(LCD_HEIGHT-1)/2;
char
xdir =
1,
ydir =
1;
|
Ici nous
définissons les variables qu'utilisera le
programme:
i
est va permettre juste d'être utilisé
dans la boucle de temporisation.
xpos
et ypos sont les variables qui vont
permettre de situer la balle sur l'écran
de telle sorte que ça coordonné soit
(xpos,ypos), ici nous les inialisons de tel sorte
qu'au lancement du programme la balle ce situe au
centre de l'écran et ce sur n'importe quel
modèle de calculatrice.
xdir
et ydir permettent de définir
le sens de déplacement de la balle, dans
notre programme, ses variables ne pourrons prendre
que 2 valeurs (-1 ou 1), si xdir=1, la balle ce
déplacera vers la droite et si xdir=-1, vers
la gauche, s'est le même principe pour ydir.
Si ydir=-1, la balle ce déplacera vers le
haut et si ydir=1, vers le bas.
Voilà
nos variables, maintenant nous devons les exploiter:
|
ClrScr ();
Sprite8 (xpos,
ypos,8
,ball_sprite, LCD_MEM, SPRT_OR);
while
(_keytest
(RR_ESC)==FALSE)
{
Sprite8
(xpos, ypos,
8, ball_sprite, LCD_MEM, SPRT_XOR);
xpos+=xdir;
ypos+=ydir;
if (xpos+8
> (LCD_WIDTH-1))
xdir =
-1;
if (xpos
<
0)
xdir =1;
if (ypos+8
>
(LCD_HEIGHT-1))
ydir =
-1;
if (ypos
<
0)
ydir =
1;
Sprite8
(xpos,
ypos, 8,
ball_sprite, LCD_MEM, SPRT_OR);
for (i=0;
i<10000;
i++);
}
|
Nous
effacons tout d'abord l'écran avec ClrScr
(à savoir que c'est une fonction de TIGCC)
et nous affichons la balle avec sprite8
en mode OU logique.
La
boucle while execute une série
d'instruction entre {}
tant que la condition est vrai, ici tant que nous
n'avons pas appuyez sur la touche ESC. Après
nous nous occupons d'effacer la balle sur l'écran
en l'affichant avec sprite8 mais en
mode OU exclusif (XOR), nous ajoutant xdir
à xpos et ydir
à ypos de telle sorte d'effectuer
le mouvement de la balle. Une fois cette étape
d'effectué, il faut vérifier que la
balle ne sorte pas de l'écran, pous cela
on applique des collisions entre les points ce situant
à l'extremité de la balle donc si
nous voulons tester correctement si il y a collisions
avec le bas de l'écran et la balle nous devons
ajouter 8 à xpos dans
notre condition car la balle fait 8 pixels de hauteur
et procéder de la même façon
pour les autres collisions, mais au lieu de changer
xpos ou ypos dans notre
résultat , nous changerons les vecteurs de
directions xdir ou ydir.
Et ensuite pour finir nous affichons la balle avec
sprite8 en mode OU logique
et nous effectuons une boucle de temporisation
avec for pour que la balle ne soit
pas trop rapide et que son temps d'affichage soit
visible.
Nous allons
donc maintenant créer les 4 séquences
audio de collisions avec l'écran, pour cela
vous devez créer un nouveau fichier du type
header (portant l'extension h) que vous nommerez
'sounds_ball.h'
et l'inclure dans le projet en tapant au début
du code '#include
"sounds_ball.h"'. Ouvrez le
fichier 'sounds_ball.h'
et copiez le code suivant:
//C Source File
//Created 11/10/2003; 17:13:50
//Collision avec la gauche
unsigned short collide_left[]={2500,15,
1415,21,
1000,30,
2000,10,
0xFFFF};
//Collision avec la droite
unsigned short collide_right[]={5500,15,
2415,21,
3000,30,
4000,10,
0xFFFF};
//Collision vers le haut
unsigned short collide_up[]={1250,10,
2300,30,
3800,10,
4500,10,
0xFFFF};
//Collision vers le bas
unsigned short collide_down[]={5845,5,
600,10,
5423,30,
8645,20,
0xFFFF};
|
Voici
enfin notre fichier 'sounds_ball.h'
remplit de données sonores, ici nous avons
réaliser 4 listes de données pour
PlayFX, les données de PlayFX s'ordonnent
de façon précise:
fréquence,
durée,
fréquence,
durée
.... fréquence,
durée,
0xFFFF
La
fréquence peut aller de 0 (considéré
comme une pause) à 32768 Hz, ses valeurs
ne sont pas précise et les durées
vont de 1 à 255 et sont en cycles tempo,
soit 32 correspondant à une noire. Ce mode
est très difficile à utiliser mais
produit des résultats assez impressionnant.
(note: c'est le seul mode qui n'a pas de
logiciel de conversion). Une liste de données
pour PlayFX doit toujhours ce terminer par 0xFFFF
et ce pour indiquer ça fin à PolySnd
v2.0.
Voici
maintenant le code du programme principal, nous
avons juste modifié les conditions lors de
collisions:
|
//
C Source File
// Created 11/10/2003; 17:13:50
#include
<tigcclib.h>
#include "polysnd2.h"
INT_HANDLER OldInt1
=
NULL;
INT_HANDLER OldInt2 =
NULL;
DEFINE_INT_HANDLER
(myint2)
{
pokeIO (0x60001B,0);
}
unsigned char ball_sprite [] = {0b00111100,
0b01111110,
0b11111111,
0b11111111,
0b11111111,
0b11111111,
0b01111110,
0b00111100};
//Programme
principal
void
_main(void)
{
int
i;
short
xpos
= (LCD_WIDTH-1)/2;
short
ypos =
(LCD_HEIGHT-1)/2;
char
xdir =
1,
ydir =
1;
OldInt1
= GetIntVec (AUTO_INT_1);
OldInt2 = GetIntVec (AUTO_INT_2);
SetIntVec (AUTO_INT_1,
DUMMY_HANDLER);
SetIntVec (AUTO_INT_2,
myint2);
pSnd_EnableSound ();
pSnd_InstallSound ();
pSnd_PlayMode
(MONO);
pSnd_SetTempo (1000);
ClrScr
();
Sprite8 (xpos,
ypos,8
,ball_sprite, LCD_MEM, SPRT_OR);
while
(_keytest
(RR_ESC)==FALSE)
{
Sprite8
(xpos, ypos,
8, ball_sprite, LCD_MEM, SPRT_XOR);
xpos+=xdir;
ypos+=ydir;
if (xpos+8>(LCD_WIDTH-1))
{
xdir=-1;
pSnd_PlayFX_voice1
(collide_right);
pSnd_SetState
(VOICE1);
}
if (xpos<0)
{
xdir=1;
pSnd_PlayFX_voice1
(collide_left);
pSnd_SetState
(VOICE1);
}
if (ypos+8>(LCD_HEIGHT-1))
{
ydir=-1;
pSnd_PlayFX_voice1
(collide_down);
pSnd_SetState
(VOICE1);
}
if (ypos<0)
{
ydir=1;
pSnd_PlayFX_voice1
(collide_up);
pSnd_SetState
(VOICE1);
}
Sprite8
(xpos,
ypos, 8,
ball_sprite, LCD_MEM, SPRT_OR);
for (i=0;
i<10000;
i++);
}
pSnd_UninstallSound ();
pSnd_DisableSound ();
SetIntVec (AUTO_INT_1,
OldInt1);
SetIntVec (AUTO_INT_2,
OldInt2);
}
|
Nous
réglons PolySnd v2.0 en mode mono grâce
à pSnd_PlayMode puis nous paramètrons
le tempo à 1000 bpm avec SetTempo,
ici pSnd_SetTempo_voice1 aurait suffit.
Dans
chaque conditions de collisions nous jouant un son
ce trouvant dans le fichier 'sounds_ball.h'
avec pSnd_PlayFX_voice1 et nous donnons
l'ordre à PolySnd v2.0 de jouer le mode de
la voie1 avec pSnd_SetState (VOICE1),
ici comme nous sommes en mono, VOICE1 suffit.
PolySnd v2.0 n'attend pas qu'un mode soit finit
de jouer pour executer le suivant, celui qui était
en cours et ignoré au profit du nouveau mode
et des nouvelles données (bien sûr
il est toujours possible de programmer une gestion
de modes...).
Télécharger
example3.zip partie 1.
Animation
d'une balle avec du son (partie n°2):
Nous
allons réaliser le même programme que
précédément mais cette fois
si en donnant la priorité au son et donc
bloquant le cours du programme lorsqu'un son est
joué. Vous allez constater que la balle subira
des ralentissements. Mais cette méthode est
utile dans le cas ou vous devez executer des actions
en fonction du son.